|









 |
 |
|
<< content
Introduction

"The voices in a human mind is like an invisible teacher that: gives information, make decisions, alert the host to danger, observe the environment, generate common sense knowledge, predict the future, schedule tasks, manage tasks, solve problems, do induction/deduction, understand natural language, etc. This invisible teacher, which exist in a human mind, was created from a lifetime worth of learning from school, through personal experience, and knowledge from books."
 The big question is how can researchers build a robot that can think like a human mind? It took me a very long time to design this Human Level AI program. First I had to figure out how the human mind works. I discovered how the human mind worked by writing my thoughts down in a notebook while doing various tasks, like cooking, driving, playing video games, or watching a movie. After months of collecting data and compiling them into meaningful information, I finally had the basic structure of a digital human brain. After years of refining the AI program, in 2006 I published my first book, entitled: Human Level Artificial Intelligence.
The book you're reading now is my 5th and final book. I decided to call it Human Level Artificial Intelligence, 2nd edition. I did a thourough job in my first 4 books, and I did a great job in explaining the data structure of my AI program to the public. However, over the years, I still have missing subject matters that I didn't fully reveal.
This book is about revealing, in microscopic details, how the human brain works and how to build an Artificial Intelligent program that can mimic human intelligence. My advice to readers is to read the entire book from beginning to ending, chapter1 to chapter13. If you're press for time, read the last chapter, chapter13, because the majority of HLAI is explained there.
Summary of Invention
Scientists from MIT and Stanford University have been trying to teach their robots to learn information in a bootstrapping manner. If the robot learns simple math like addition, how can he use that knowledge to solve a problem? In another example, if the robot learns a complex concept like a binary tree, how can he use that knowledge to write a customer database system?
Humans learn knowledge from kindergarden to college. Old information is used to learn new information and the knowledge in the robot's brain "recursively" builds on top of each other to form complex intelligence.
Humans learn math through a bootstrapping manner, whereby information builds on top of each other to form complex intelligence. First we learn algebra, then we take that knowledge to learn trigonometry. Next, we take trigonometry to learn calculus. Finally, we take calculus to learn discrete math or computer science.
The big question is how can researchers build a robot that can think like a human mind? It took me a very long time to design this Human Level AI program. First I had to figure out how the human mind works. I discovered how the human mind worked by writing my thoughts down in a notebook while doing various tasks, like cooking, driving, playing video games, or watching a movie. After months of collecting data and compiling them into meaningful information, I finally had the basic structure of a digital human brain. After years of refining the AI program, in 2006 I published my first book, entitled: Human Level Artificial Intelligence.
The book you're reading now is my 5th and final book. I decided to call it Human Level Artificial Intelligence, 2nd edition. I did a thourough job in my first 4 books, and I did a great job in explaining the data structure of my AI program to the public. However, over the years, I still have missing subject matters that I didn't fully reveal.
This book is about revealing, in microscopic details, how the human brain works and how to build an Artificial Intelligent program that can mimic human intelligence. My advice to readers is to read the entire book from beginning to ending, chapter1 to chapter13. If you're press for time, read the last chapter, chapter13, because the majority of HLAI is explained there.
Summary of Invention
Scientists from MIT and Stanford University have been trying to teach their robots to learn information in a bootstrapping manner. If the robot learns simple math like addition, how can he use that knowledge to solve a problem? In another example, if the robot learns a complex concept like a binary tree, how can he use that knowledge to write a customer database system?
Humans learn knowledge from kindergarden to college. Old information is used to learn new information and the knowledge in the robot's brain "recursively" builds on top of each other to form complex intelligence.
Humans learn math through a bootstrapping manner, whereby information builds on top of each other to form complex intelligence. First we learn algebra, then we take that knowledge to learn trigonometry. Next, we take trigonometry to learn calculus. Finally, we take calculus to learn discrete math or computer science.
 Learning English in a bootstrapping manner.
Language encapsulate entire knowledge and allow the robot to learn different skills in a bootstrapping manner. FIG. 16A shows a diagram depicting how the robot learns to write a book. English sentences are used to encapsulate entire instructions, called pathways.
In FIG. 16A, first, the robot learns to write words and understand basic grammar rules (V1-V2). Next, he takes those skills to write a sentence (V3). Then he takes the knowledge of writing a sentence to write a paragraph (V4). Finally, the robot takes previous knowledge to write a book (V5). Notice in FIG. 16B, said robot is using previously learned skills to write a book. For example, he is repeatedly using basic grammar rules, writing sentences, and writing paragraphs to write a book. As you might recall, writing a paragraph requires writing several sentences and using basic grammar rules.
Learning English in a bootstrapping manner.
Language encapsulate entire knowledge and allow the robot to learn different skills in a bootstrapping manner. FIG. 16A shows a diagram depicting how the robot learns to write a book. English sentences are used to encapsulate entire instructions, called pathways.
In FIG. 16A, first, the robot learns to write words and understand basic grammar rules (V1-V2). Next, he takes those skills to write a sentence (V3). Then he takes the knowledge of writing a sentence to write a paragraph (V4). Finally, the robot takes previous knowledge to write a book (V5). Notice in FIG. 16B, said robot is using previously learned skills to write a book. For example, he is repeatedly using basic grammar rules, writing sentences, and writing paragraphs to write a book. As you might recall, writing a paragraph requires writing several sentences and using basic grammar rules.
 English sentences represent a task or sub-task. sentences is a fixed object that can represent a fuzzy or abstract concept. There are many cats in this world, coming in different sizes, shapes, and 3-d animation, but the word cat is a fixed object to represent a broad range of the species. In this case, sentences are used to represent or encapsulate very complex tasks. This type of encapsulation allows complex intelligence to form in the human brain, and enabling us to solve college level problems.
FIG. 11 depicts several examples of words and sentences representing abstract objects or actions. When the robot senses the target object, the meaning automatically activates in his mind. A simple example is shown in the first 2 items. If the robot hears the sound "cat" the meaning to the word will activate in his mind. In this case, a picture of a cat or a primitive cat movie will activate in the robot's mind. In the second item, a picture of a lemon is sensed by the robot and the meaning to the picture activates in his mind. For the robot, the sound "lemon" will be heard in his mind. Also the picture of a lemon causes the robot's saliva to secrete from his mouth. This is becuase sour and the sound "lemon" has strong association with a picture of a lemon.
English sentences represent a task or sub-task. sentences is a fixed object that can represent a fuzzy or abstract concept. There are many cats in this world, coming in different sizes, shapes, and 3-d animation, but the word cat is a fixed object to represent a broad range of the species. In this case, sentences are used to represent or encapsulate very complex tasks. This type of encapsulation allows complex intelligence to form in the human brain, and enabling us to solve college level problems.
FIG. 11 depicts several examples of words and sentences representing abstract objects or actions. When the robot senses the target object, the meaning automatically activates in his mind. A simple example is shown in the first 2 items. If the robot hears the sound "cat" the meaning to the word will activate in his mind. In this case, a picture of a cat or a primitive cat movie will activate in the robot's mind. In the second item, a picture of a lemon is sensed by the robot and the meaning to the picture activates in his mind. For the robot, the sound "lemon" will be heard in his mind. Also the picture of a lemon causes the robot's saliva to secrete from his mouth. This is becuase sour and the sound "lemon" has strong association with a picture of a lemon.
 Sentences can also represent very complex instructions. The sentence, "write a book(V5)", encapsulate the entire instructions to write a book. The sentence, "write a paragraph(V4)", encapsulates the entire instructions to write a paragraph. As a reminder, writing a book(V5) utilizes (V4) repeatedly and V4 uses V3 repeatedly and V3 uses V2 repeatedly. The English language allows the robot's brain to recursively encapsulate groups of instructions to a fixed media, which is a word or a sentence/s and allow knowledge to form complex structures.
when the robot is making a decision and the sentence: "write a book in your spare times", activates in his mind, the sentence encapsulate all the complex instructions to write a book. That one sentence represents all the knowledge the robot needs to write a book. This sentence is also known as an internal instruction, given by the robot himself to take action.
Sentences can also represent very complex instructions. The sentence, "write a book(V5)", encapsulate the entire instructions to write a book. The sentence, "write a paragraph(V4)", encapsulates the entire instructions to write a paragraph. As a reminder, writing a book(V5) utilizes (V4) repeatedly and V4 uses V3 repeatedly and V3 uses V2 repeatedly. The English language allows the robot's brain to recursively encapsulate groups of instructions to a fixed media, which is a word or a sentence/s and allow knowledge to form complex structures.
when the robot is making a decision and the sentence: "write a book in your spare times", activates in his mind, the sentence encapsulate all the complex instructions to write a book. That one sentence represents all the knowledge the robot needs to write a book. This sentence is also known as an internal instruction, given by the robot himself to take action.
 Self-Awareness (the robot's conscious)
"The term, human conscious (n), used in this book means: a human being who is self-awared, alive, and thinking".
the robot's conscious (or the robot's mind) is the imaginary voice that provides instructions to take action; it can: do human tasks, do multiple simultaneous tasks, solve interruptions of tasks, solve conflicts of tasks, provide knowledge about an object/s, give meaning to language, generate common sense knowledge, solve problems, learn information, answer questions, follow commands given, search memory for information, or take any human action.
Examples of the robot's conscious (aka activated thoughts)
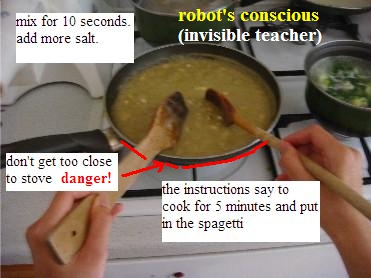
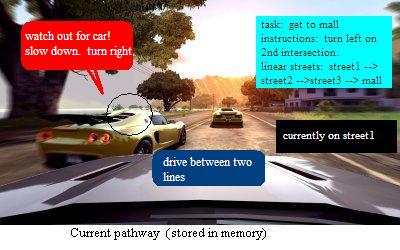
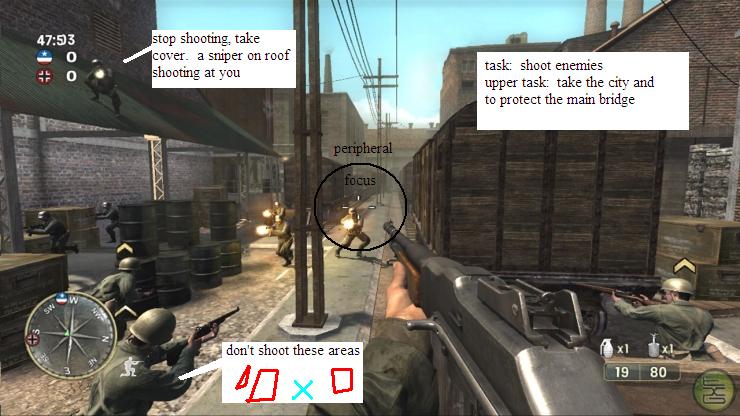
The three pictures below show different types of robots: a robot driver, a robot soldier, and a robot cook. The robot's conscious is the imaginary voice in his head that: provide information, think, give instructions, recall information, make decisions, solve problems, predict the future, generate future steps to reach a goal and so forth. The robot's conscious is usually represented by internal sentences (sound data) or simple visual data.
Self-Awareness (the robot's conscious)
"The term, human conscious (n), used in this book means: a human being who is self-awared, alive, and thinking".
the robot's conscious (or the robot's mind) is the imaginary voice that provides instructions to take action; it can: do human tasks, do multiple simultaneous tasks, solve interruptions of tasks, solve conflicts of tasks, provide knowledge about an object/s, give meaning to language, generate common sense knowledge, solve problems, learn information, answer questions, follow commands given, search memory for information, or take any human action.
Examples of the robot's conscious (aka activated thoughts)
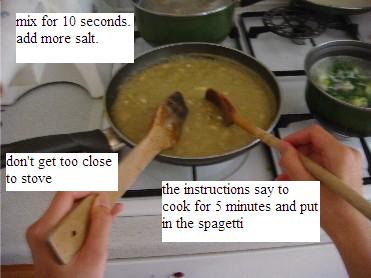
The three pictures below show different types of robots: a robot driver, a robot soldier, and a robot cook. The robot's conscious is the imaginary voice in his head that: provide information, think, give instructions, recall information, make decisions, solve problems, predict the future, generate future steps to reach a goal and so forth. The robot's conscious is usually represented by internal sentences (sound data) or simple visual data.
 PictureA
PictureA
 PictureD
PictureD
 PictureE
PictureE
Referring to PictureE, every frame of the robot's 5 senses are stored in memory. These pathways store the linear data that the robot goes through to do a certain task. There are certain goals and rules that are automatically done by the robot without given the instructions. For example, the robot knows it has to stay a certain distance from the stove or the current task is to cook spagetti. These tasks are implied in the pathways and doesn't require the robot's conscious to remind the robot all the different rules and goals it needs to do. Only the most important facts/rules are activated by the conscious. The human brain is very primitive and it can only focus on several things at any given moment in time. The pathways guide the robot to do things automatically, while the robot's conscious gives the most important facts/rules during specific times.
Teachers in school teach the robot various skills, like mathematics, science, decision making, learning information, social skills, generating common sense knowledge, logical inferencing, and physical education.
The most important thing teachers can teach the robot is the ability to "teach itself" to learn, practice, and do tasks. For example if the robot doesn't know how to drive a car, it can teach itself how to drive. The robot will seek knowledge from driving school or books to learn and practice. Practicing is an integral part of driving a car because it helps the robot refine its skill and become an expert.
Once the driving knowledge is stored in memory, the robot's brain can use decision making pathways to "use" the driving knowledge to drive a car.
As stated above, the robot's conscious manage tasks for the robot. However, there are many other things the robot's conscious can do, such as:
1. learning a task (learning a new skill like driving a car or cooking a lobster dish)
2. practicing a task.
3. usage of a task/s
4. modification of a task.
To illustrate my point I will show how my robot learns to drive a car. Keep in mind humans learn to drive a car in a completely different manner from an autonomous car. First of all, we don't have navigation systems in our brains, nor machine learning or GPS systems. Pay close attention to the way the robot learns, practices, and uses a task.
The knowledge to drive a car using human intelligence.
A skill like driving a car is thousands of times more complex than playing chess. There are more rules, more goals, and safety rules to follow. How does a human learn to drive? We learn to drive from both, driving teachers and knowledge in books.
 For the robot, he will use the learning a skill pathway to learn the goals and rules of driving. The robot will use logic and common sense to seek out the most important information in books or lectures. The sentences from driving books self-organize in a self-creating semantic network (FIG. 45A). Information will be stored optimally and visually. The goals are stored here and the rules are stored there.
Since the rules of driving is plenty, in the rules container are even more organized structures to store operational functions, recursive rules, hierarchical rules, solving conflicting if-then statements, and nested-if-then statements.
The learning pathways store optimal search functions to look for data quickly in this driving semantic network. These search functions are also self-created.
Next, the practice pathway is used to create and store linear instructions in driving pathways (FIG. 45B). As usual, the robot's mind will use common sense knowledge to create and store instructions in pathways. After months of driving and trial and error, the robot creates optimal driving pathways to drive a car, perfectly.
The learning pathways and the practice pathways create the pathways to drive a car in the robot's brain. Once the data is there, the robot can use another decision making pathway to "use" that knowledge (driving task). FIG. 45C is a diagram depicting a decision making pathway20 to use 2 different tasks (driving a car and talking on the phone). This decision making pathway20 is doing 2 simultaneous tasks at the same time.
For the robot, he will use the learning a skill pathway to learn the goals and rules of driving. The robot will use logic and common sense to seek out the most important information in books or lectures. The sentences from driving books self-organize in a self-creating semantic network (FIG. 45A). Information will be stored optimally and visually. The goals are stored here and the rules are stored there.
Since the rules of driving is plenty, in the rules container are even more organized structures to store operational functions, recursive rules, hierarchical rules, solving conflicting if-then statements, and nested-if-then statements.
The learning pathways store optimal search functions to look for data quickly in this driving semantic network. These search functions are also self-created.
Next, the practice pathway is used to create and store linear instructions in driving pathways (FIG. 45B). As usual, the robot's mind will use common sense knowledge to create and store instructions in pathways. After months of driving and trial and error, the robot creates optimal driving pathways to drive a car, perfectly.
The learning pathways and the practice pathways create the pathways to drive a car in the robot's brain. Once the data is there, the robot can use another decision making pathway to "use" that knowledge (driving task). FIG. 45C is a diagram depicting a decision making pathway20 to use 2 different tasks (driving a car and talking on the phone). This decision making pathway20 is doing 2 simultaneous tasks at the same time.
 As the reader can see I’m not using any AI methods from autonomous cars. My robot learns information to drive from reading books or watching lectures. Humans don't have a navigation system, or machine learning, or GPS in their brains. They drive a car based on human intelligence and not by data structures from autonomous cars.
As the reader can see I’m not using any AI methods from autonomous cars. My robot learns information to drive from reading books or watching lectures. Humans don't have a navigation system, or machine learning, or GPS in their brains. They drive a car based on human intelligence and not by data structures from autonomous cars.
<< content
chapter 1 >>
|
| |
|