|









 |
 |
| |
Welcome to my website! |
|
|
 |
|
"
The voices in a human mind is like an invisible teacher that: gives information, make decisions, alert the host to danger, observe the environment, generate common sense knowledge, predict the future, schedule tasks, manage tasks, solve problems, do induction/deduction reasoning, understand natural language, etc. This invisible teacher, which exist in a human mind, was created from a lifetime worth of learning from school, through personal experience, and knowledge from books.
 My goal for this website is to explain how the human brain works and how to build a digital brain comparable to human level intelligence.
My goal for this website is to explain how the human brain works and how to build a digital brain comparable to human level intelligence.
Human level Artificial Intelligence (2nd edition)--free download
Data Structure
to Human Level Artificial Intelligence (summary)
Super AI #211 (latest)--free download
In 2006 I published a book called Human-Level Artificial Intelligence book1 and shortly after that filed several back-to-back patents. The patents depict a robot that can do a complex human task: to play RPG video games like Zelda and Metroid. The game Zelda was used because it showed my robot can do recursive tasks, understand natural language, do deduction/induction reasoning, predict the future, make decisions, navigate in an unknown environment, generate common sense knowledge, add/delete/modify tasks, do logical inferencing, etc. The invention was examined and determined to be new, novel, and non-obvious. In other words, I was the first inventor to file the invention.
Of course, bits and pieces of my invention have been discovered by others, but in terms of the overall data structure, it was declared a new invention upon the Patent office's examination. The invention was written on 8 separate patent applications, 4 of which are utility patents and the other 4 are provisional patents. Needless to say, the entire software program is really long. It took me 5-6 years to design this Artificial intelligence.
The central focus of the patent was to describe an A.I. program that can play any video game for any game console without any predefined rules or goals. I wasn't talking about an evolving A.I. program that learns from scratch (deep learning 2016). I was referring to a robot that has human level intelligence and uses that knowledge to play any video game for any game console, including brand new games. No machine learning training is involved.
The reason I used video games as the primary example in the patent was to show people that this robot has acheived human level A.I.. Video games is an exemplary example to use because different games require different skills and cognitive functions that are exclusive only to humans. The premise is that if the robot can play all video games for all game consoles, then it can essentially do any complex human task.
In terms of prior art, Google's Artificial Intelligence 2015 called deep Q network is the most advance. Fortunately for me, The deep Q network is only able to play Atari games, like Space invaders and Pong. My patents were written to outline a robot that can play Zelda. Zelda is a video game thousands of times more advance than Atari games. On the other hand, IBM's Watson and Apple's Siri are expert systems and are classified as weak AI. What I and Google (and others) are trying to build is regarded in the scientific community as strong AI.
In their press conference in 2016, Google announced they are currently pursuing Artificial Intelligence that can play complex video games, like Zelda, Metroid, and Call of duty, but it will take them a very long time (up to a decade) to research and develop. If they manage to accomplish this task, it would be interesting to see how their software works and what the patent office will do. According to my analysis, Google will need to significantly change their current AI in order to play Zelda. There are "lots" of inexplicable problems they need to solve first before they can accomplish this task (read their patent). One such problem is instilling common sense knowledge into their A.I. system.
Human-level Artificial Intelligence is the official term used to describe a robot that can think and act like a human with college level intelligence (1950? Alan Turing). There is another recently coined term called AGI, which stands for artificial general intelligence.
When you apply human-level AI to video games, the robot is thinking like a human. He is idenifying objects in the game, making decisions, planning strategies to beat the game, generating common sense knowledge, doing simultaneous tasks, doing recursive tasks, brainstorming new strategies, correcting itself, setting recursive goals and so on. By using Human-level AI, the robot is able to play any video game because he is using human intelligence to play, and not pre-defined instructions by a programmer or machine learning techniques, including the more recent reinforcement learning and hybrid systems, case in point Deep Learning.
In contrast to conventional A.I., my robot has the amazing ability to play new games that it has never played before, or adapt a pre-existing skill to something similar (drive a car | drive a motorcycle). Even knowledge of driving a motorcycle is borrowed from driving a car, which means the robot doesn't have to relearn all the objectives, rules, and procedures from scratch.
In fact, this robot can do any human task. If he doesn't know how to drive a car, the robot can spend time reading books or attend driving school to learn this skill. He will need to practice driving in order to refine his skills. All knowledge in the robot's brain comes from attending school. No human programmers are needed to predefine language skills, or problem solving skills, or rules of life, etc. This robot simply goes to school to learn grammar or problem solving or decision making skills.
|
|
| |
|
|
|
|
|
|
|
Human-Level
Artificial Intelligence: second edition
by Mitchell Kwok
 this is my 5th and final book this is my 5th and final book


The current artificial intelligence
theories don’t work (2006)
Some people think that building a robot to open a door is a very easy
thing to do. Reality is that it is very difficult to program a robot
to open a door (under any circumstances). MIT and Stanford
University have been emphasizing this problem for a very long time. They use
hierarchical recursive planning programs, such as the strip program to solve
this problem. The robot needs to fulfill preconditions, such as
possession of a key, in order to open
a door. What if the robot can't find the key?
or the key chain has 20 different keys and only one key can unlock the door? Even more difficult and inexplicable is the fact that the robot might not find the key
and uses alternative methods to get into the room (such as breaking a window
or calling a locksmith).
Expert programmers have to program in all the possibilities of opening a door
and the possibilities run infinitely.
If scientists can't build a robot to do a simple task like open a
door, then what makes you think they can build a robot to replace a janitor
or nurse. A human janitor can open a door under any circumstances.
In addition, the human janitor can do many other tasks like clean a room,
mop the floors, answer questions, wash dishes, pick up a package from the
post office, report incidents, and drive a car. Robots have to be
pre-programmed with specific instructions, both knowledge and procedures, for every single human task. This is the main
reason why software companies have not commercially sold robots to replace
basic human jobs yet (janitors, nurses, teachers, construction workers,
factory workers, farm workers, etc).
Human Level Artificial Intelligence
The human brain is a recording device that records 5 sense movie sequences, called pathways. These movie sequences store the 5 senses: sight, sound, taste, touch, and smell. Muscle movements and pain/pleasure is a part of the touch sense and included in the pathways.
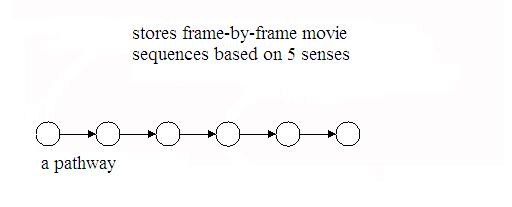
The purpose of the pathways is to store both static information and linear information. A picture is considered static information, while the steps to cook a hamburger is considered linear information. Pathways are structured hierarchically and this is where deep learning is applied to each pathway experienced by the robot. Deep learning store static information, like a picture, or sequence data, like the instructions to cook a hamburger, in an optimal manner where information is shared (using hierarchical trees) and repeated information are minimized.
If the robot experiences 10 million cat images, his digital brain isn't storing all 10 million cat images in memory. The robot's brain stores several cat objects in memory and said 10 million cat images share information in hierarchical tree/s. A more complex type of deep learning is applied to movie experiences, aka pathways. In the example below are 3 pathways that are very similar. The words used in each pathway is different, but the meaning is very similar/same. After learning many examples, only the meaning is stored in memory.
 Finally, the robot's brain forget information in a hiearchical manner. In terms of deep learning, the lower levels are forgotten first, but the higher levels are harder to forget.
The key to human intelligence
Language is the key to how these pathways are structured in an intelligent manner. Language will define the functions and behaviors of each pathway in the robot's brain. In FIG. 3, the sentence: "shoot the basketball until it goes into the hoop" is a for-loop that will loop itself based on a condition/s.
Finally, the robot's brain forget information in a hiearchical manner. In terms of deep learning, the lower levels are forgotten first, but the higher levels are harder to forget.
The key to human intelligence
Language is the key to how these pathways are structured in an intelligent manner. Language will define the functions and behaviors of each pathway in the robot's brain. In FIG. 3, the sentence: "shoot the basketball until it goes into the hoop" is a for-loop that will loop itself based on a condition/s.
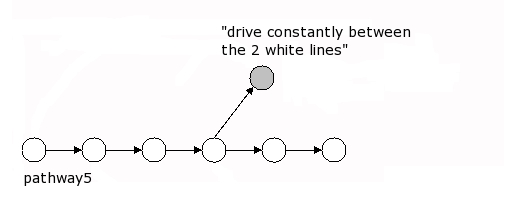
 in this example, the sentence: "constantly drive between the 2 white lines" is a constant rule that tells the pathway to constantly follow this rule while driving.
in this example, the sentence: "constantly drive between the 2 white lines" is a constant rule that tells the pathway to constantly follow this rule while driving.
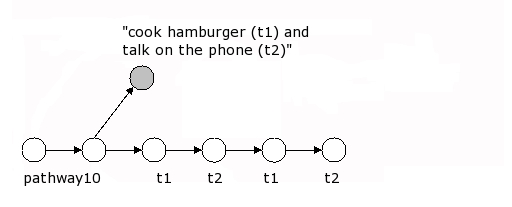
 in this example, the sentence: "cook hamburger and talk on the phone simultaneously" manage 2 tasks simultaneously by switching between tasks until both tasks are completed.
in this example, the sentence: "cook hamburger and talk on the phone simultaneously" manage 2 tasks simultaneously by switching between tasks until both tasks are completed.
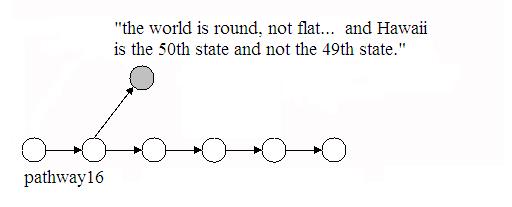
 in this example, the sentence: "the world is round, not flat... and Hawaii is the 50th state and not the 49th state." is forcing the robot's brain to correct wrong information stored in memory. In this case, the correct data is created in memory (marked as correct) and the wrong data will have a forget function next to it (marked as wrong). Thus, the next time the robot retrieves the fact, the correct data will be present. This example shows pathways can do complex database functions.
in this example, the sentence: "the world is round, not flat... and Hawaii is the 50th state and not the 49th state." is forcing the robot's brain to correct wrong information stored in memory. In this case, the correct data is created in memory (marked as correct) and the wrong data will have a forget function next to it (marked as wrong). Thus, the next time the robot retrieves the fact, the correct data will be present. This example shows pathways can do complex database functions.
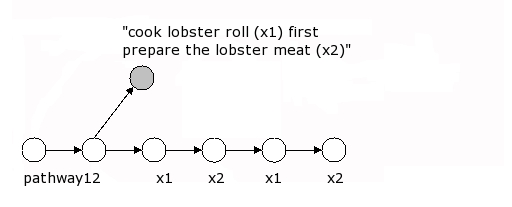
 in this example, the sentence: "cook lobster roll. first, prepare the lobster meat" manages recursive tasks. The 2 sentences basically manages recursive tasks. It knows it is currently making a lobster roll. At the same time, it also knows that the first step is to prepare the lobster meat. After finishing the first task the second task will pop up in the robot's brain.
in this example, the sentence: "cook lobster roll. first, prepare the lobster meat" manages recursive tasks. The 2 sentences basically manages recursive tasks. It knows it is currently making a lobster roll. At the same time, it also knows that the first step is to prepare the lobster meat. After finishing the first task the second task will pop up in the robot's brain.
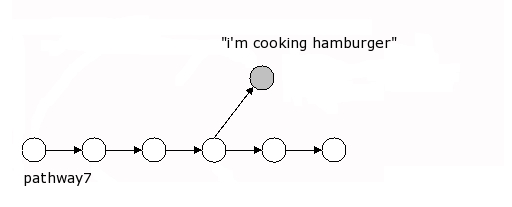
 in this example, the sentence: "cook hamburger" is a constant task. The pathway will contain the beginning and ending of the task.
in this example, the sentence: "cook hamburger" is a constant task. The pathway will contain the beginning and ending of the task.
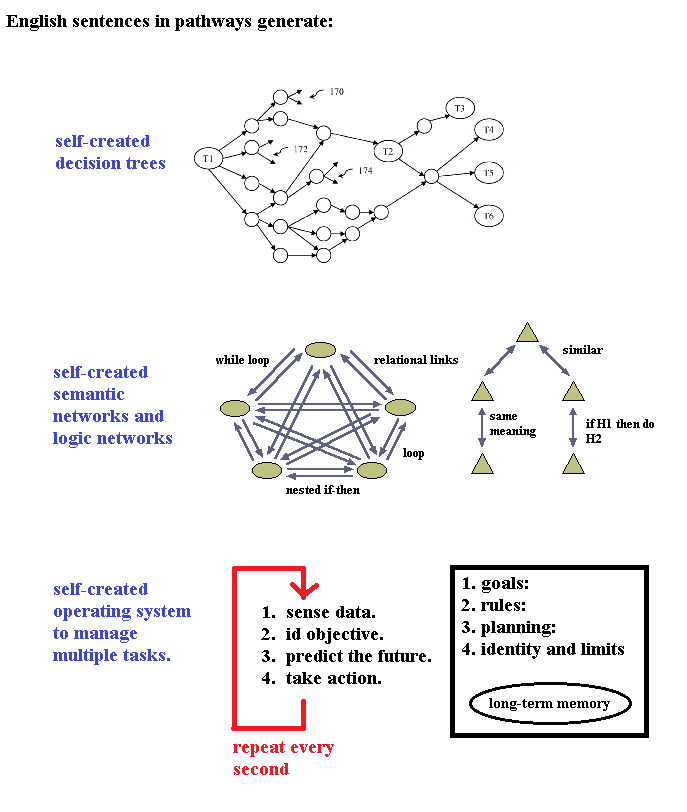
 If you think about it, these intelligent pathways can form any type of state machine or computer program. Pathways can form for-loops, while-loops, procedures, recursive functions, multiple tasks, simultaneous tasks, complex if-then statements, and combinations of operations. It can also reference other pathways in memory. Data in pathways are also changeable, whereby data can be deleted, added or modified as the robot learns from the environment.
Pathways store linear data like the English ABC's or verses from the bible. As the robot experiences life, the pathways become longer and stronger (forming decision trees). Since the robot is storing movie experiences in memory, pathways automatically form decision trees in memory. The pathways are also subject to forget and it will break itself into a plurality of elemental pathways with lower "data quality". In other words, the more it forgets the harder it is for the robot to remember an experience.
The point I’m trying to make is that pathways + English sentences generate self-created semantic networks in the robot’s brain. Data in memory are organized in complex data structures based on English sentences. Data inside the robot's brain establishes relational links and operations, and search functions are discovered on its own to search for data in these semantic networks. Pathways can even form self-creating database systems, self-creating operating system to manage multiple tasks, or any self-creating state machines.
If you think about it, these intelligent pathways can form any type of state machine or computer program. Pathways can form for-loops, while-loops, procedures, recursive functions, multiple tasks, simultaneous tasks, complex if-then statements, and combinations of operations. It can also reference other pathways in memory. Data in pathways are also changeable, whereby data can be deleted, added or modified as the robot learns from the environment.
Pathways store linear data like the English ABC's or verses from the bible. As the robot experiences life, the pathways become longer and stronger (forming decision trees). Since the robot is storing movie experiences in memory, pathways automatically form decision trees in memory. The pathways are also subject to forget and it will break itself into a plurality of elemental pathways with lower "data quality". In other words, the more it forgets the harder it is for the robot to remember an experience.
The point I’m trying to make is that pathways + English sentences generate self-created semantic networks in the robot’s brain. Data in memory are organized in complex data structures based on English sentences. Data inside the robot's brain establishes relational links and operations, and search functions are discovered on its own to search for data in these semantic networks. Pathways can even form self-creating database systems, self-creating operating system to manage multiple tasks, or any self-creating state machines.
Learning information in terms of a bootstrapping process
The robot learns information in terms of a bootstrapping process, whereby data is built on top of each other. First the robot has to go to elementary school, then intermediate school, then high school, and finally, college. Every single Artificial Intelligence subject matter, like decision making, planning, natural language processing (NLP), recursive planning, hierarchical planning, generating common sense knowledge, induction/deduction, predicting the future, physical motor skills, speech, language understanding, and so forth will be learned in school. There are no human programmers writing codes in the robot's brain regarding any of the subject matters mentioned above, such as NLP or decision making. This robot learns all of lifes' skill by going to school and interacting with the environment. Basic fundamental skills like walking or climbing stairs is learned by teachers. No programmers are needed to write codes to make the robot walk or climb stairs.
As the robot learns information from school, pathways in its brain recursively builds ontop of each other and become more complex and intelligent. It becomes self-awared after a certain point (about age 3) when it begins to make its own decisions based on pain and pleasure. FIG.13 shows a really complex pathway to play a game. This pathway contains linear instructions and decision making in terms of playing "any" game. I will go into the details of this diagram later on.
 Now, let's look at how the robot's brain works. It senses information from the environment called the current pathway. Next, it finds a similar match to said current pathway in memory. The pathways found in memory are not necessarily based on the robot's 5 senses, but primarily on the robot's thoughts (called activated thoughts). For example, if the robot is thinking of cooking a hamburger, his brain will find pathways to cook hamburger, and not pathways based on what he is currently seeing or sensing from the environment. Next, the robot's brain will predict the future for each intelligent pathway found in memory and rank them. The optimal pathway will be the pathway it will select to take action. These functions repeat itself every second the robot is alive. It allows the robot's brain to correct itself based on the current environment. For example, if the robot is riding a bike and a rock jams the front wheel, the robot will take "split second" action to avoid any physical harm. That's why it has to constantly update itself every second to find the best course of action. The purpose of the robot is to select pathways in memory that will lead to pleasure and avoid pathways in memory that will lead to pain.
Now, let's look at how the robot's brain works. It senses information from the environment called the current pathway. Next, it finds a similar match to said current pathway in memory. The pathways found in memory are not necessarily based on the robot's 5 senses, but primarily on the robot's thoughts (called activated thoughts). For example, if the robot is thinking of cooking a hamburger, his brain will find pathways to cook hamburger, and not pathways based on what he is currently seeing or sensing from the environment. Next, the robot's brain will predict the future for each intelligent pathway found in memory and rank them. The optimal pathway will be the pathway it will select to take action. These functions repeat itself every second the robot is alive. It allows the robot's brain to correct itself based on the current environment. For example, if the robot is riding a bike and a rock jams the front wheel, the robot will take "split second" action to avoid any physical harm. That's why it has to constantly update itself every second to find the best course of action. The purpose of the robot is to select pathways in memory that will lead to pleasure and avoid pathways in memory that will lead to pain.
 So as it senses information from the environment over a short period of time, the robot's conscious is created, which is a computer program that manages tasks and rules. the robot's conscious is the imaginary voice that provides instructions to take action; it can: do human tasks, do multiple simultaneous tasks, solve interruptions of tasks, solve conflicts of tasks, provide knowledge about an object/s, give meaning to language, generate common sense knowledge, solve problems, learn information, answer questions, follow commands given, search memory for information, or take any human action.
So as it senses information from the environment over a short period of time, the robot's conscious is created, which is a computer program that manages tasks and rules. the robot's conscious is the imaginary voice that provides instructions to take action; it can: do human tasks, do multiple simultaneous tasks, solve interruptions of tasks, solve conflicts of tasks, provide knowledge about an object/s, give meaning to language, generate common sense knowledge, solve problems, learn information, answer questions, follow commands given, search memory for information, or take any human action.
 The human concious (self-awareness)
The medical community has tried to define what a human conscious is for hundreds of years. No Psychologist will tell you the meaning to a conscious because they don’t know what it is. My theory on the human conscious is based on a rudimentary analysis of human behavior. I basically use myself as the guinea pig to find out what the conscious is. I had to brainstorm and ask myself many questions in order to come up with a definitive conclusion.
"The term, human conscious (n), used on this website means: a human being who is self-awared, alive, and thinking".
The conscious is something that took a lifetime to accumulate. The conscious you have right now started the moment you were born. As you grew older the knowledge you accumulated from all your teachers are stored in memory and “averaged out”. The conscious for you is the result of the average lessons learned in life. All the teachers you had, all the lessons taught by them are stored in memory (when I say teachers I mean parents, friends, strangers, teachers, tv lectures, etc). For example, if you were crossing the street, the first thing your conscious will tell you is: “stop, look left, look right, and make sure there are no cars before crossing the street”. This lesson in crossing the street isn’t a specific lesson taught to you by one teacher, it is the average lessons taught by numerous teachers. The conscious is a construction of intelligence from a lifetime worth of learning. If you recall all the lessons taught to you about crossing the street, the average of these lessons gives you the knowledge to cross the street.
Examples of the robot's conscious (aka activated thoughts)
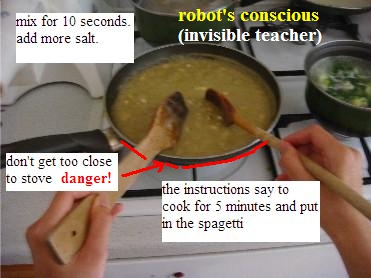
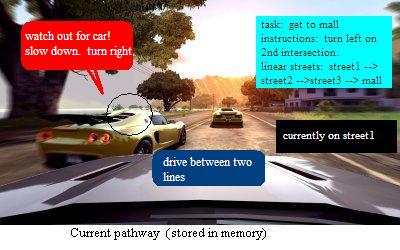
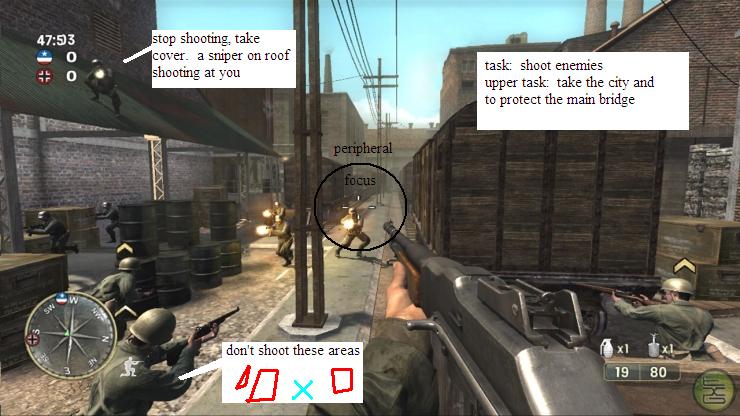
The three pictures below show different types of robots: a robot driver, a robot soldier, and a robot cook. The robot's conscious is the imaginary voice in his head that: provide information, think, give instructions, recall information, make decisions, solve problems, predict the future, generate future steps to reach a goal and so forth. The robot's conscious is usually represented by internal sentences (sound data) or simple visual data.
The human concious (self-awareness)
The medical community has tried to define what a human conscious is for hundreds of years. No Psychologist will tell you the meaning to a conscious because they don’t know what it is. My theory on the human conscious is based on a rudimentary analysis of human behavior. I basically use myself as the guinea pig to find out what the conscious is. I had to brainstorm and ask myself many questions in order to come up with a definitive conclusion.
"The term, human conscious (n), used on this website means: a human being who is self-awared, alive, and thinking".
The conscious is something that took a lifetime to accumulate. The conscious you have right now started the moment you were born. As you grew older the knowledge you accumulated from all your teachers are stored in memory and “averaged out”. The conscious for you is the result of the average lessons learned in life. All the teachers you had, all the lessons taught by them are stored in memory (when I say teachers I mean parents, friends, strangers, teachers, tv lectures, etc). For example, if you were crossing the street, the first thing your conscious will tell you is: “stop, look left, look right, and make sure there are no cars before crossing the street”. This lesson in crossing the street isn’t a specific lesson taught to you by one teacher, it is the average lessons taught by numerous teachers. The conscious is a construction of intelligence from a lifetime worth of learning. If you recall all the lessons taught to you about crossing the street, the average of these lessons gives you the knowledge to cross the street.
Examples of the robot's conscious (aka activated thoughts)
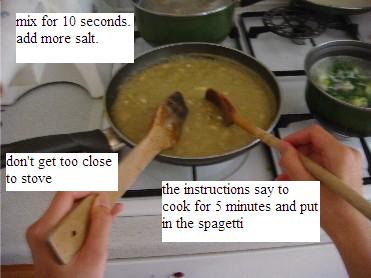
The three pictures below show different types of robots: a robot driver, a robot soldier, and a robot cook. The robot's conscious is the imaginary voice in his head that: provide information, think, give instructions, recall information, make decisions, solve problems, predict the future, generate future steps to reach a goal and so forth. The robot's conscious is usually represented by internal sentences (sound data) or simple visual data.
 PictureA
PictureA
 PictureD
PictureD
 PictureE
PictureE
Referring to PictureE, every frame of the robot's 5 senses are stored in memory. These pathways store the linear data that the robot goes through to do a certain task. There are certain goals and rules that are automatically done by the robot without given the instructions. For example, the robot knows it has to stay a certain distance from the stove or the current task is to cook spagetti. These tasks are implied in the pathways and doesn't require the robot's conscious to remind the robot all the different rules and goals it needs to do. Only the most important facts/rules are activated by the conscious. The human brain is very primitive and it can only focus on several things at any given moment in time. The pathways guide the robot to do things automatically, while the robot's conscious gives the most important facts/rules during specific times.
Details of the robot’s conscious
The robot selects intelligent pathways in memory based on the current environment. After a short period of time, these intelligent pathways construct one or more computer programs to take action. These computer programs represents the robot‘s conscious. Also, the robot's conscious is the imaginary voice that provides instructions to take action; it can: do human tasks, do multiple simultaneous tasks, solve interruptions of tasks, solve conflicts of tasks, provide knowledge about an object/s, give meaning to language, generate common sense knowledge, solve problems, learn information, answer questions, follow commands given, search memory for information, or take any human action.
These computer programs in the robot’s conscious was created by lessons learned from school teachers. This method is called unsupervised learning in the real world (for more information about how the robot’s conscious works refer to my books).
Within these computer programs are functions and procedures to process information. If we go deeper into the conscious, there are systems that uses information in containers and process them to output intelligence. These containers include: the task container, the rules container, the identity container, the planning container and others (FIG. 6). Furthermore, there is an empty space where work is done, images are extracted from memory, lines are drawn on the image to produce meaningful information, images are manipulated, words are written down, logical sequences are generated, etc (FIG. 5B). The entire computer program inside the conscious was designed so that the robot is able to learn all information from teachers; and no programmers were needed to manually input information into the robot's brain.
Example:
In terms of the 4 containers, if a pathway contains a sentence like: "constantly drive between the 2 white lines", that constant rule will be stored in the rules container. if a pathway contains a sentence (or implied visually) like: "cooking hamburger", that constant task is put in the task container. If a pathway contains a sentence (or implied visually) like: "cook hamburger and talk on the phone simultaneously", that 2 simultaneous task will be stored in the task container. Other sentences in pathways like: "do the tasks on the list in linear order", will instruct the task container on how and when to do certain tasks. Thus, the 4 containers is like an operating system that manages tasks and rules.
The robot’s conscious applied to a video game
The task of playing a video game is a good example of how human robots act intelligently in a dynamic environment. When playing a game, the robot has to use logic and common sense knowledge in order to past the game. Playing a racing game or a RPG game is very difficult and the player has to understand the rules of the game, the objectives, how the controls work, how to solve problems, how to get the character from one destination to the next, how to come up with plans to beat the game and so forth.
The legend of Zelda is a very good example because the robot has to use human-level intelligence in order to past the game. The Zelda game isn’t like a side-scrolling action game, whereby the player accomplishes levels in linear order. In Zelda, the player has to talk to characters in the game and these characters will tell the player what to do next. If the player doesn’t follow the instructions from characters, he will get lost and end up losing the game. The key to passing the Zelda game is to use human logic to come up with planned strategies to take action; and through countless trial and error.
The intelligence in the robot’s brain comes from a bootstrapping process, whereby new data is built on top of old data. When we play a video game, we are actually using our knowledge of playing a general game. The lessons of playing sports games in real life, the lessons of playing chase master, the lessons of playing a board game, the lessons of driving a car, the lessons of an occupation actually comes from one universal way of playing a game.
Referring to FIG. 13, pathway B1 is a universal pathway to play any game. The steps in B1 are very general, in that, all games played have these linear steps. If you observe a sports game or a board game, they have these general steps. B2 is a more specific pathway to play a game. In this case, B2 represent playing a video game. All the intelligent pathways (B1-B3) are all encapsulated and structured in a hierarchical manner so that the data goes from general to specific. Intelligent pathway B3, on the other hand, record detailed steps to play a specific game. If the game is the legend of Zelda, the steps to playing this game are different from the steps to playing a racing game.
In intelligent pathway B2, the player has to set goals in terms of the type of video game played and based on the player’s goals in the game. Next, in the video game are various rules and boundaries the player has to follow. Then, the player has to also know what buttons control what actions in the video game. When playing a video game, the controller controls the actions of a character/s on the monitor the robot is seeing. On the other hand, if the robot was playing a real sports game, he has to use his body to take action.
Conscious thoughts of the robot (2nd type)
Following the instructions in the optimal pathway is one type of conscious thoughts of the robot. The second type of conscious thoughts is based on activated element objects.
Activated thoughts of the robot works by the following steps:
1. The robot receives 5 sense data from the environment.
2. Objects recognized by the robot are called target objects and element objects are objects in memory that have strong association to the target object.
3. The robot's brain will collect all element objects from all target objects and determine which element objects to activate. Each target object might have multiple copies in memory so each target object will gather element objects from all or most same copies in memory.
4. All element objects will compete with one another to be activated and the strongest element object/s will be activated.
5. These activated element objects will be in the form of words, sentences, images, or instructions to guide the robot's brain to do one of the following: provide meaning to language, solve problems, plan tasks, solve interruption of tasks, predict the future, think, or analyze a situation.
6. The activated element object/s is also known as the robot’s conscious (internal thoughts).
FIG.2A
Referring to FIG. 2A, when the robot's brain locates the three visual objects: A, B, C in memory it will run electricity through these nodes and all of its connections.
The mind has a fixed timeline. Only one element object can be activated at a given time in this timeline. This is how we prevent too much information from being processed and allow the robot's brain to focus on the things that it senses from its 5 senses
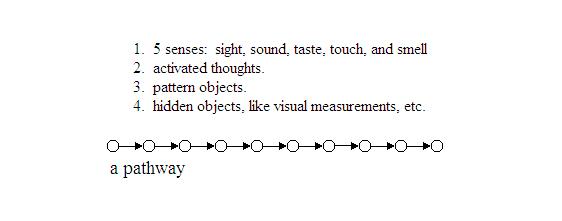
The robot’s pathways (also called the robot‘s experiences) store 5 sense data, activated thoughts, hidden data, and pattern objects. Muscle movements and pain/pleasure is a part of the touch sense and included in the pathways. In addition to the 5 senses, the pathways are also storing linear activated thoughts and other vital data, such as hidden visual data and patterns. Refer to my books for further details.
 -------------- Other topics ----------------
Referencing pathways
English sentences stored in pathways can reference other pathways.
The diagram below shows a pathway to reference other individual pathways. In this case, pathway20 is a pathway that does 2 simultaneous tasks (R1 and R2).
The sentence: "cook hamburger and play a racing video game simultaneously" manage 2 tasks simultaneously by switching between tasks until both tasks are completed.
Pathway20 is known as a universal pathway because R1 and R2 can be any task. Pathway20 simply references individual task pathways in memory to manage 2 simultaneous tasks. For example, R1 can be cook pizza or R2 can be clean the living room.
-------------- Other topics ----------------
Referencing pathways
English sentences stored in pathways can reference other pathways.
The diagram below shows a pathway to reference other individual pathways. In this case, pathway20 is a pathway that does 2 simultaneous tasks (R1 and R2).
The sentence: "cook hamburger and play a racing video game simultaneously" manage 2 tasks simultaneously by switching between tasks until both tasks are completed.
Pathway20 is known as a universal pathway because R1 and R2 can be any task. Pathway20 simply references individual task pathways in memory to manage 2 simultaneous tasks. For example, R1 can be cook pizza or R2 can be clean the living room.
 In pathway20 there is also another task, which is to temporarily change the rules of the racing game. The instructions include following a temporary rule: red light is green light and green light is red light. The dominant information in memory is green light is go and red light is stop. However, the temp rule allows the robot to temporarily follow the opposite rule. This shows that pathway20 can temporarily change the rules and goals of pathway R2.
Also, English sentences stored in pathways basically define how data is stored, configured, and searched. The robot goes to school to learn knowledge and that knowledge define how data is stored, configured and searched in the robot's brain.
In pathway20 there is also another task, which is to temporarily change the rules of the racing game. The instructions include following a temporary rule: red light is green light and green light is red light. The dominant information in memory is green light is go and red light is stop. However, the temp rule allows the robot to temporarily follow the opposite rule. This shows that pathway20 can temporarily change the rules and goals of pathway R2.
Also, English sentences stored in pathways basically define how data is stored, configured, and searched. The robot goes to school to learn knowledge and that knowledge define how data is stored, configured and searched in the robot's brain.
Self-awareness
Self-awareness means a human or robot that can control their actions, both mental thought and physical action, in an intelligent manner (with college level intelligence). The primary function of the robot is to pursue actions that will lead to pleasure and stay away from actions that lead to pain. Thus, the robot is self-aware because he is able to manage tasks. This includes: doing a task, doing multiple tasks, doing simultaneous tasks, solving interruptions of tasks, aborting tasks, modifying tasks, scheduling tasks, following rules while doing tasks, etc.
Basically the robot is alive and self-aware as a result of the robot's conscious. The robot's conscious manages tasks. In addition, the robot's conscious can also do other things like observe the environment for danger or unusual events, alert the robot to dangers from the environment, filter out sensed data from the environment, generate facts about objects, generate common sense knowledge, solve problems, extract facts from memory, etc. Referring to FIG 60, all tasks are structured hierarchically. These task range from driving a car to playing video games to making a sandwich. Similar experiences will be stored closer to each other. For example, driving a car is similar to driving a motorcycle so they are hierarchically structured and stored close to each other.
 Also, data in the robot's brain are stored and gravitate close to each other based on association. In FIG 60, the playing racing video game pathway will be stored close to driving a real motorcycle because of their similarities. Data like cat and dog will gravitate towards each other in memory because of association.
When all the task pathways self-organize, based on hierarchical similarities and association, universal decision making pathways are created, which form the top of the hierarchy (the robot's brain comprises massive forests and trees). These decision making pathways control and manage tasks for the robot. In other words, the robot is self-aware because of the decision making pathways.
The most important thing is that the decision making pathways are created by lessons learned in school and through personal experience. All decision making pathways are learned from either teachers in school or information in books. As state before, my robot's brain does not use machine learning, neural networks, NLP, decision trees, genetic programming, semantic network, predicate calculus or any modern day AI. However, it does use deep learning to break up data in movie sequences (called pathways) so that data can be stored in an optimal manner. Only 10 percent of the robot's data structure is devoted to deep learning. Despite what people say I, in part, discovered deep learning back in 2006 (not counting notebooks from college).
Let's take a look at what kind of pathways are stored in the decision making pathways. If you look at MIT and Stanford University's research papers and books, they focus on mainly recursive tasks. In my Invention, teachers teach the robot how to do recursive tasks. Also, storing linear steps in pathways is one way to represent recursive tasks. If the robot is making a sandwich and is doing step1, step2, step3 etc, he is automatically doing recursive tasks. More complex type of recursive tasks are learned from teachers. For example, the teacher can teach the robot to manage complex recursive tasks by writing things down. If the robot has to do a task that has 200 recursive sub-tasks he can write things down on a peice of paper. He can mark off completed tasks and see which tasks to do next, or which tasks to abort, or modify, etc. For simple recursive tasks, the robot can use his brain to remind himself what tasks to do.
Referring to FIG 60, pathway20 is doing simultaneous tasks. Teachers teach the robot to do task1, stop, do task2, stop, continue task1, stop, continue task2, stop, continue task1, etc. The robot has to repeat this until both task1 and task2 are completed.
Referring to FIG 62, pathway36 is doing a task quickly or at a speed. Teachers teach the robot how to speed up or slow down a task. Through repeated experience, the robot creates a universal pathway in memory that can do any given task quickly. Teachers also teach about the consequences of speeding up a task. For example, if the sandwich is done too quickly, the robot might make mistakes like drop the lettuce or adding too much tomato sauce. Only through personal experience and learning a wide variety of task to speed up can the robot truly refine his skills.
Also, data in the robot's brain are stored and gravitate close to each other based on association. In FIG 60, the playing racing video game pathway will be stored close to driving a real motorcycle because of their similarities. Data like cat and dog will gravitate towards each other in memory because of association.
When all the task pathways self-organize, based on hierarchical similarities and association, universal decision making pathways are created, which form the top of the hierarchy (the robot's brain comprises massive forests and trees). These decision making pathways control and manage tasks for the robot. In other words, the robot is self-aware because of the decision making pathways.
The most important thing is that the decision making pathways are created by lessons learned in school and through personal experience. All decision making pathways are learned from either teachers in school or information in books. As state before, my robot's brain does not use machine learning, neural networks, NLP, decision trees, genetic programming, semantic network, predicate calculus or any modern day AI. However, it does use deep learning to break up data in movie sequences (called pathways) so that data can be stored in an optimal manner. Only 10 percent of the robot's data structure is devoted to deep learning. Despite what people say I, in part, discovered deep learning back in 2006 (not counting notebooks from college).
Let's take a look at what kind of pathways are stored in the decision making pathways. If you look at MIT and Stanford University's research papers and books, they focus on mainly recursive tasks. In my Invention, teachers teach the robot how to do recursive tasks. Also, storing linear steps in pathways is one way to represent recursive tasks. If the robot is making a sandwich and is doing step1, step2, step3 etc, he is automatically doing recursive tasks. More complex type of recursive tasks are learned from teachers. For example, the teacher can teach the robot to manage complex recursive tasks by writing things down. If the robot has to do a task that has 200 recursive sub-tasks he can write things down on a peice of paper. He can mark off completed tasks and see which tasks to do next, or which tasks to abort, or modify, etc. For simple recursive tasks, the robot can use his brain to remind himself what tasks to do.
Referring to FIG 60, pathway20 is doing simultaneous tasks. Teachers teach the robot to do task1, stop, do task2, stop, continue task1, stop, continue task2, stop, continue task1, etc. The robot has to repeat this until both task1 and task2 are completed.
Referring to FIG 62, pathway36 is doing a task quickly or at a speed. Teachers teach the robot how to speed up or slow down a task. Through repeated experience, the robot creates a universal pathway in memory that can do any given task quickly. Teachers also teach about the consequences of speeding up a task. For example, if the sandwich is done too quickly, the robot might make mistakes like drop the lettuce or adding too much tomato sauce. Only through personal experience and learning a wide variety of task to speed up can the robot truly refine his skills.
 Referring to FIG 64, pathway42 is a very important pathway because the robot is trying to combine knowledge from 2 or more tasks (pathways). Scientists from MIT and Stanford University have been trying to teach their robots to learn information in a bootstrapping manner. If the robot learns simple math like addition, how can he use that knowledge to solve a problem? In another example, if the robot learns what a binary tree is, how can he use that knowledge to write a customer database system?
Humans learn math through a bootstrapping manner, whereby information builds on top of each other to form complex intelligence. First we learn algebra, then we take that knowledge to learn trigonometry. Next, we take trigonometry to learn calculus. Then, we take calculus to learn discrete math or computer science.
Referring to FIG 64, pathway42 is a very important pathway because the robot is trying to combine knowledge from 2 or more tasks (pathways). Scientists from MIT and Stanford University have been trying to teach their robots to learn information in a bootstrapping manner. If the robot learns simple math like addition, how can he use that knowledge to solve a problem? In another example, if the robot learns what a binary tree is, how can he use that knowledge to write a customer database system?
Humans learn math through a bootstrapping manner, whereby information builds on top of each other to form complex intelligence. First we learn algebra, then we take that knowledge to learn trigonometry. Next, we take trigonometry to learn calculus. Then, we take calculus to learn discrete math or computer science.
 Referring to FIG 64, pathway42 is taking 2 tasks and combining them. A simple example would be: task1 is to manage bullets in call of duty. task2: do addition. if the first task is to manage bullets in call of duty, then the robot has to use bullets as variables when doing the addition problem. Let's say the robot (the player) picks up 2 gun clips from a house, he obviously has to keep track of the amount of bullets he has in his gun so he must do simple math: addition. The robot currently has 40 bullets in his gun and each gun clip has 15 bullets. Since he has 2 gun clips the equation will look like this: 40 +15 +15 = 70. Thus, currently the robot has 70 bullets in his gun.
Referring to FIG 64, pathway42 is taking 2 tasks and combining them. A simple example would be: task1 is to manage bullets in call of duty. task2: do addition. if the first task is to manage bullets in call of duty, then the robot has to use bullets as variables when doing the addition problem. Let's say the robot (the player) picks up 2 gun clips from a house, he obviously has to keep track of the amount of bullets he has in his gun so he must do simple math: addition. The robot currently has 40 bullets in his gun and each gun clip has 15 bullets. Since he has 2 gun clips the equation will look like this: 40 +15 +15 = 70. Thus, currently the robot has 70 bullets in his gun.
 In this case, bullets is a variable and it is used to plug into the addition problem. This is how the robot takes knowledge like addition and apply that knowledge to a given problem. Pathway42 showcase a more complex example. Task1 is to write a customer database system and task2 is to use knowledge on binary trees. Now, the robot has to take knowledge learned about binary trees, which is an algorithm, and apply it to build a customer database system. Obviously the robot has to identify variables and functions from the customer database system and insert them into a binary tree. For example, the nodes in a binary tree will represent customer information and the search operation will be A-M is used for the left search and N-Z is used for the right search.
Thus, learning information in terms of a bootstrapping process is actually a learned thing. It is learned from teachers in school. This is important because some AI scientists think genetic programming or decision trees is the key to this type of self learning. It isn't.
In conclusion the human brain isn't special. All intelligent thinking from a human brain comes from knowledge learned in school and there is no divine angel that is giving us information. The voice in a human's mind is like an invisible teacher that: gives information, make decisions, alert the host to danger, observe, generate common sense knowledge, predict the future, schedule tasks, etc. This invisible teacher, which exist in a human mind, was created from a lifetime worth of learning from school, through personal experience, and knowledge from books.
As stated above, decision making pathways manage tasks for the robot. However, there are many other things these decision making pathways can do, such as:
1. learning a task (learning a new skill like driving a car or cooking a lobster dish)
2. practicing a task.
3. usage of a task/s
4. modification of a task.
To illustrate my point I will show how my robot learns to drive a car. Keep in mind, humans learn to drive a car in a completely different manner from an autonomous car. First of all, we don't have navigation systems in our brains, nor machine learning or GPS systems. Pay close attention to the way the robot learns, practices, and uses a task.
The knowledge to drive a car using human intelligence.
In this case, bullets is a variable and it is used to plug into the addition problem. This is how the robot takes knowledge like addition and apply that knowledge to a given problem. Pathway42 showcase a more complex example. Task1 is to write a customer database system and task2 is to use knowledge on binary trees. Now, the robot has to take knowledge learned about binary trees, which is an algorithm, and apply it to build a customer database system. Obviously the robot has to identify variables and functions from the customer database system and insert them into a binary tree. For example, the nodes in a binary tree will represent customer information and the search operation will be A-M is used for the left search and N-Z is used for the right search.
Thus, learning information in terms of a bootstrapping process is actually a learned thing. It is learned from teachers in school. This is important because some AI scientists think genetic programming or decision trees is the key to this type of self learning. It isn't.
In conclusion the human brain isn't special. All intelligent thinking from a human brain comes from knowledge learned in school and there is no divine angel that is giving us information. The voice in a human's mind is like an invisible teacher that: gives information, make decisions, alert the host to danger, observe, generate common sense knowledge, predict the future, schedule tasks, etc. This invisible teacher, which exist in a human mind, was created from a lifetime worth of learning from school, through personal experience, and knowledge from books.
As stated above, decision making pathways manage tasks for the robot. However, there are many other things these decision making pathways can do, such as:
1. learning a task (learning a new skill like driving a car or cooking a lobster dish)
2. practicing a task.
3. usage of a task/s
4. modification of a task.
To illustrate my point I will show how my robot learns to drive a car. Keep in mind, humans learn to drive a car in a completely different manner from an autonomous car. First of all, we don't have navigation systems in our brains, nor machine learning or GPS systems. Pay close attention to the way the robot learns, practices, and uses a task.
The knowledge to drive a car using human intelligence.
A skill like driving a car is thousands of times more complex than playing chess. There are more rules, more goals, and safety rules to follow. How does a human learn to drive? We learn to drive from both driving teachers and books.
 For the robot, he will use the learning a skill pathway to learn the goals and rules of driving. The robot will use logic and common sense to id the most important information in books or lectures. The sentences from driving books self-organize in a self-creating semantic network (FIG. 45A). Information will be stored optimally and visually. The goals are stored here and the rules are stored there.
Since the rules of driving is plenty, in the rules container are even more organized structures to store operational functions, recursive rules, hierarchical rules, solving conflicting if-then statements, and nested-if-then statements.
The learning pathways store optimal search functions to look for data quickly in this driving semantic network. These search functions are also self-created.
Next, the practice pathway is used to create and store linear instructions in driving pathways (FIG. 45B). As usual, the robot's mind will use common sense knowledge to create and store instructions in pathways. After months of driving and trial and error, the robot creates optimal driving pathways to drive a car, perfectly.
The learning pathways and the practice pathways create the pathways to drive a car in the robot's brain. Once the data is there, the robot can use another decision making pathway to "use" that knowledge (driving task). FIG. 45C is a diagram depicting a decision making pathway20 to use 2 different tasks (driving a car and talking on the phone). This decision making pathway20 is doing 2 simultaneous tasks at the same time.
For the robot, he will use the learning a skill pathway to learn the goals and rules of driving. The robot will use logic and common sense to id the most important information in books or lectures. The sentences from driving books self-organize in a self-creating semantic network (FIG. 45A). Information will be stored optimally and visually. The goals are stored here and the rules are stored there.
Since the rules of driving is plenty, in the rules container are even more organized structures to store operational functions, recursive rules, hierarchical rules, solving conflicting if-then statements, and nested-if-then statements.
The learning pathways store optimal search functions to look for data quickly in this driving semantic network. These search functions are also self-created.
Next, the practice pathway is used to create and store linear instructions in driving pathways (FIG. 45B). As usual, the robot's mind will use common sense knowledge to create and store instructions in pathways. After months of driving and trial and error, the robot creates optimal driving pathways to drive a car, perfectly.
The learning pathways and the practice pathways create the pathways to drive a car in the robot's brain. Once the data is there, the robot can use another decision making pathway to "use" that knowledge (driving task). FIG. 45C is a diagram depicting a decision making pathway20 to use 2 different tasks (driving a car and talking on the phone). This decision making pathway20 is doing 2 simultaneous tasks at the same time.
 As the reader can see I’m not using any AI methods from autonomous cars. My robot learns information to drive from reading books or watching lectures. Humans don't have a navigation system, or machine learning, or GPS in their brains. They drive a car based on human intelligence and not by data structures from autonomous cars.
My goal for this website is to explain how the human brain works and how to build a digital brain comparable to human level intelligence. In my opinion I have succeeded; and I'm 100 percent sure my invention filed back in 2006 is the correct AI software. Content on this page explains in general how my invention works and what it does. The actual software is really really long and complicated. Refer to my books for detailed information and examples.
As the reader can see I’m not using any AI methods from autonomous cars. My robot learns information to drive from reading books or watching lectures. Humans don't have a navigation system, or machine learning, or GPS in their brains. They drive a car based on human intelligence and not by data structures from autonomous cars.
My goal for this website is to explain how the human brain works and how to build a digital brain comparable to human level intelligence. In my opinion I have succeeded; and I'm 100 percent sure my invention filed back in 2006 is the correct AI software. Content on this page explains in general how my invention works and what it does. The actual software is really really long and complicated. Refer to my books for detailed information and examples.
Data Structure
to Super Intelligent robots
email:
amember1234@yahoo.com
|
| |
|